V2X(Vehicle-To-Everything) communication
차량이 다른 차량 및 도로, 인프라, 기타 환경 장치(environmental device)들과 communicate할 수 있게 해줌
V2X communication에 AI가 적용될 수 있는 사례
- Traffic Management
- AI 시스템은 통신 데이터를 이용해서 교통 흐름을 개선하기 위해 traffic trend를 모니터링하고, 혼잡을 예측하고, 실시간으로 조정할 수 있음
- V2X 데이터를 분석하여 ML을 통해 교통 패턴과 correlation들을 발견할 수 있음
- V2X 데이터를 실시간으로 evaluate하여 신속하고 정확한 의사 결정을 내리는 데 사용할 수 있음
- 미리 정해진 규칙(predetermined rules)을 기반으로 결정을 내리는 규칙 기반 시스템(rule-based system)이 있음
- digital twin(simulation)을 사용하여 차량과 신호등 간의 SPaT/MAP와 V2X통신을 연결하는 것을 제안하는 연구도 있음
- paper link : SPaT/MAP V2X communication between traffic light and vehicles and a realization with digital twin
- SpaT : Signal Phase and Timing → 신호등의 상태(빨간불,초록불)와 각 신호의 남은 시간(신호가 바뀌기까지 몇 초 남았는지)를 차량에 실시간으로 전달하는 프로토콜
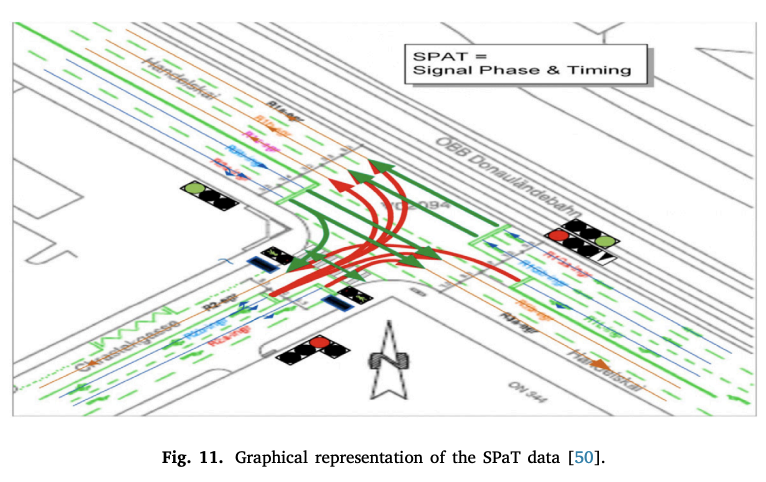
- MAP : Map Data → 지리 데이터를 차량에 제공하는 프로토콜

- 이 연구에서는 SPaT/MAP을 사용하는 교통 제어 시스템의 구현 방안을 알아본다.

- PLC : 실제 교통 신호등을 제어하며, 시스템의 다른 구성 요소들과 통신함
- Docker container에선 SPaT/MAP 통신 프로그램을 돌려 신호등의 상태나 교차로의 구조와 같은 정보를 차량에 전달
- MODBUS : 이걸 통해서 PLC와 Docker container 사이의 통신 프로토콜
- 차량과는 wifi를 통해 SPaT/MAP 통신 프로그램과 직접 통신한다.
- V2X 통신을 이용한 주요 연구 결과
- PLC를 활용하여 표준화된 V2X 프로토콜을 보장하는 교통 제어 시스템을 구축하는 연구
- V2X 통신을 기반으로 경로를 재설정하는 연구
- V2X 통신 데이터로 LSTM모델을 만들어서 교통 흐름을 예측하는 연구
- Real-time Decision-Making
- AI는 예측할 수 없는 다양한 운전상황에서 실시간으로 결정을 내릴 수 있도록함, 신속하고 정확함
- 이전 데이터를 학습하고 이를 바탕으로 예측하는 ML을 흔히 사용
- 규칙 기반 시스템
- 5G-V2X를 기반으로 복잡한 도로를 스스로 인지하는 방법을 제안하는 연구가 있음
- paper link : A Real-Time Complex Road AI Perception Based on 5G-V2X for Smart City Security
- AI 알고리즘과 5G-V2X 프레임워크를 결합하여 실시간 도로 인식 방법을 제안
- 차선 라인 특징을 감지하는 정확성을 높이기 위해 Mask R-CNN 기반의 개선된 모델을 구현
- 기존의 Fast R-CNN이나 Faster R-CNN은 클래스와 경계 상자 예측만을 수행하지만, Mask R-CNN은 추가적으로 각 픽셀의 세부적인 mask(segmentation)를 제공하여 차선 라인을 더욱 정밀하게 인식함

- How? 다양한 크기의 ROI(Region of Interest)을 고정된 크기의 출력으로 변환하여 네트어크가 일정한 크기의 데이터를 처리할 수 있어 객체의 위치를 더 정확하게 잡아낼 수 있음

- loss function of ROI
$$ L =\hat{L}_{cls) + L_{box} + L_{mask} $$
- $\hat{L}_{cls}$ (classification loss) : 올바른 클래스로 예측했는지 평가
- $L_{box}$ (bounding box regression loss) : 예측된 bounding box가 실제 객체의 위치와 얼마나 잘 맞는지를 평가
- $L_{mask}$ (mask loss) : 객체의 각 픽셀에 대한 mask를 생성하는 데 사용되고, 정확하게 세분화하는 것이 중요하기에 binary cross-entropy loss로 계산됨
$$
X' = cov(X)+ \beta_b
$$
$$
Y = \alpha \cdot \frac{X'-\mu}{\sqrt{\epsilon + \sigma^2}}+\beta
$$
- V2X 통신을 기반으로 연결된 차량을 위한 실시간 경로 계획 모델을 제시
- paper link : Real-time urban regional route planning model for connected vehicles based on V2X communication
- 도시 도로망에서 신호등의 타이밍과 단계를 고려한 경로 계획 기법을 제안
- 차량의 실시간 주행 데이터를 사용하여 V2X가 수집한 신호등 타이밍 및 단계 정보를 기반으로 도로 구간의 저항 값을 동적으로 계산
- 현재 도로망의 위상 구조에 따라 Dijkstra 알고리즘에 기반한 모든 예상 경로를 나열하고, 각 대체 경로의 예상 주행 시간을 계산하여 가장 짧은 주행 시간을 가진 경로를 선택
728x90
'AI > random' 카테고리의 다른 글
| Docker | docker image build & push & pull (0) | 2024.10.29 |
|---|---|
| pipreqsnb로 requirements.txt 생성하기 (0) | 2024.10.29 |
| 파이썬 가상환경 만들기 (venv, conda) (0) | 2024.10.27 |
| Manifold Learning (0) | 2024.09.13 |
| 오토인코더의 모든 것 1/3 by NAVER D2 (0) | 2024.09.06 |


댓글